- 貨架第三方檢測-CNAS/CMA/SEMA三重資質認可認定
- 021-67157048
職業責任險 產品責任險 公正性聲明 侵權聲明
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
- 2021-11-20 13:41:05
- 穩圖WESAFE
- 原創
- 閱讀:266
貨架的生產、組裝/安裝的公差、變形和凈距,對貨架功能實現、搬運設備的運行具有重要作用,對于確定貨架的可靠性以確保搬運設備撞擊、托盤撞擊或系統崩潰的幾率在可接受的范圍內也是很重要的。貨架公差、變形和凈距是貨架結構設計安全的基礎。
規劃者有責任與用戶協作,確保使用的公差、變形和凈距對整體系統的安全操作是可接受的。在達到同等安全操作的情況下,規劃者可以進行適當的設計/計算來改變某些參數。
考慮搬運設備的一般要求,貨架公差、變形與凈距分為不同組別,每個組別對應貨架進行安全操作需要不同的公差、變形與最小凈距。
本文講述與配備堆垛機的橫梁式貨架相關的安裝公差。
一、堆垛機控制系統分類
堆垛機可配備不同種類的定位控制系統,可實現:
——X向與Y向的坐標定位
——X向與或Y向的局部精準定位
控制系統分為以下幾類:
A類 手動控制;
B類 部分或完全自動控制的坐標定位;
C類 部分或完全自動控制的坐標定位以及僅Y向的貨格精準定位;
D類 部分或完全自動控制的坐標定位以及X向與Y向的貨格精準定位。
注:B類與C類控制系統的自學習過程有助于降低堆垛機操作凈距。
二、貨架分類
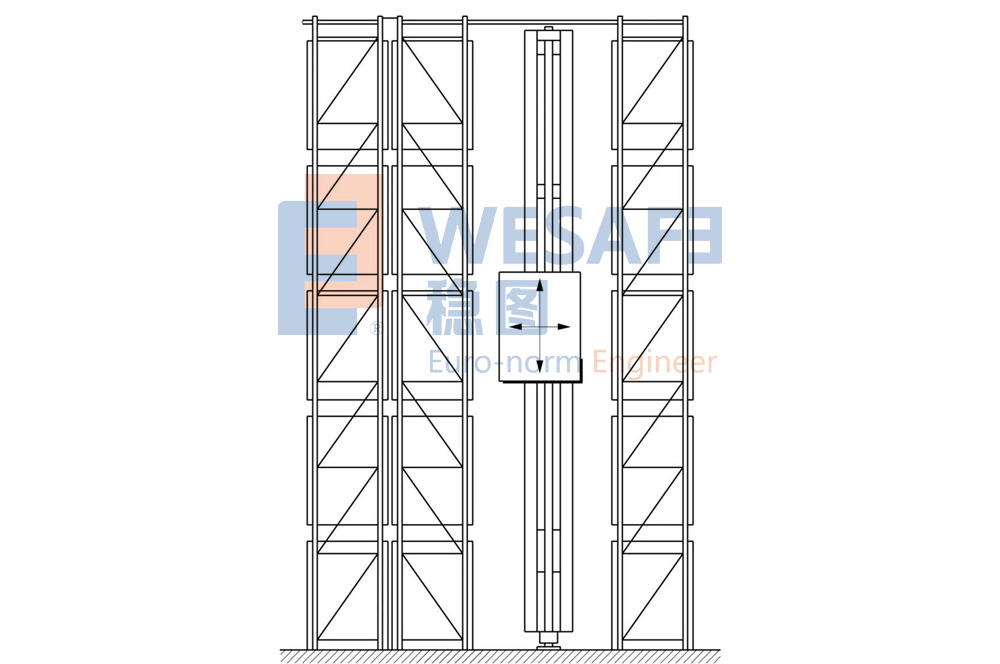
自動化立庫貨架的巷道非常窄,巷道寬度僅能容下堆垛機和存儲單元寬度加操作凈距,如下圖所示。
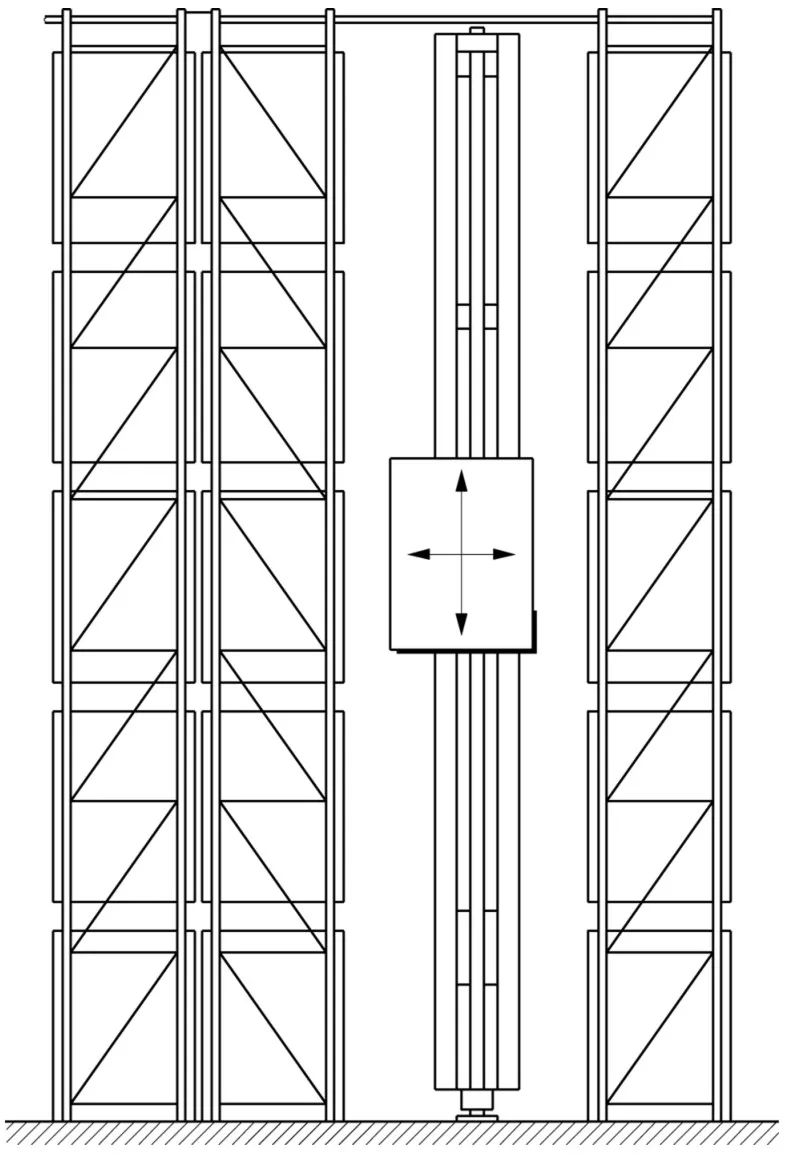
圖1 普通橫梁式貨架的水平與豎向公差
貨架的公差與變形影響操作安全。某種程度上,容許限值取決于控制系統、搬運設備與存儲單元(進叉孔尺寸)的類型。為了簡化起見,僅定義兩類與貨架設計相關的公差范圍。
2.1 Class 100:(低標準公差限值)
以配備B類控制系統、無精準定位輔助的堆垛機為主。一般應用于輕型、低到中等高度(約18m以下)的貨架。之所以是18m,是因為對于更高的貨架,立柱軸向壓縮變形要求必須設置Y向精準定位系統。
2.2 Class 200:(高標準公差限值)
以配備A、C、D類控制系統、有精準定位輔助或手動控制的堆垛機為主。
對于自動化系統,集成商應進行“公差-變形-凈距”評估并確定所需凈距,借此可以確定控制系統的類型。
三、安裝公差
如下列圖所示。
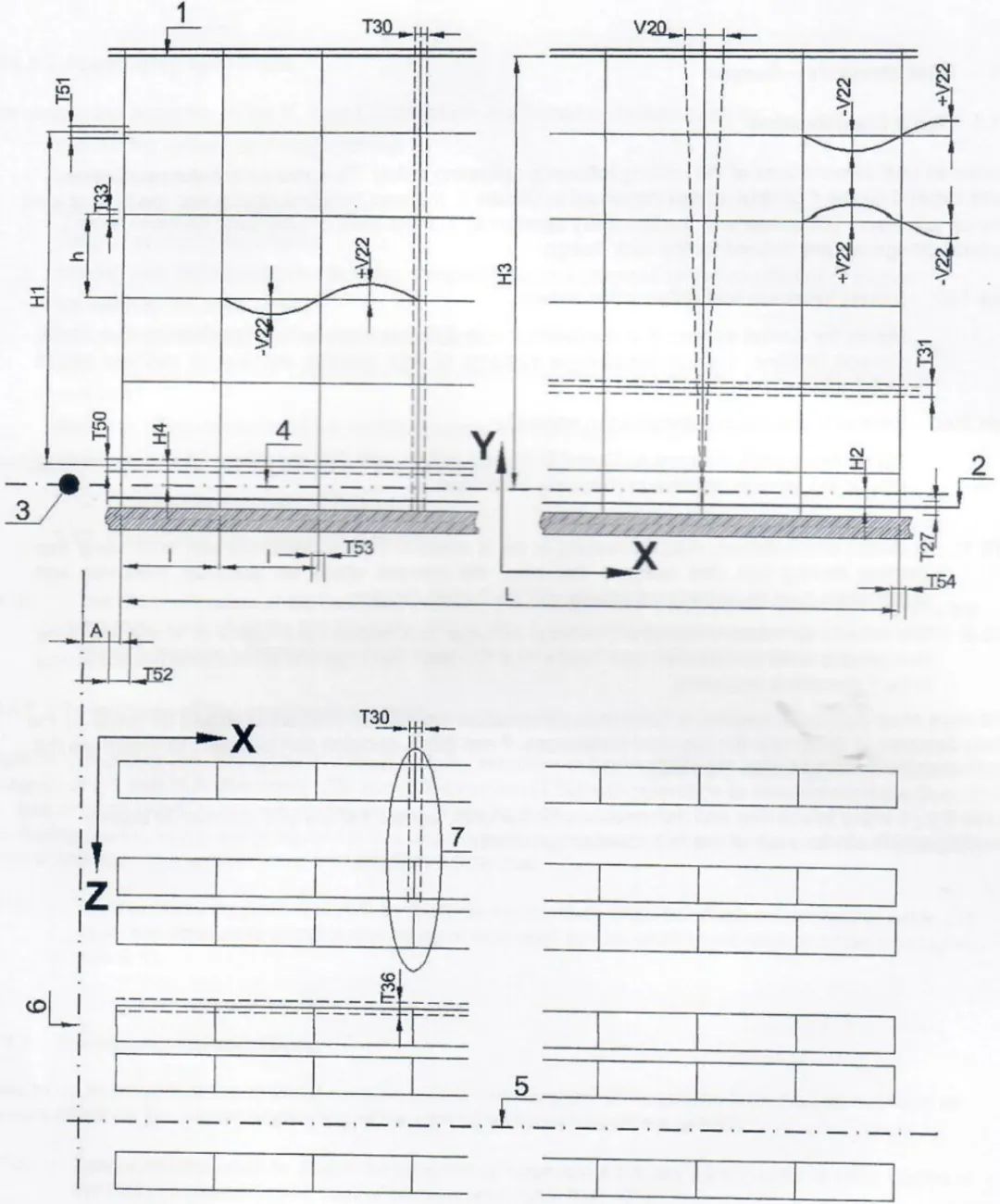
1 天軌(導向軌)底面
2 地軌(運行軌)頂面
3 基準點(固定標識)
4 X-Z基準面
5 X基準軸(固定標識)
6 Z基準軸(固定標識)
7 局部圖
(a)
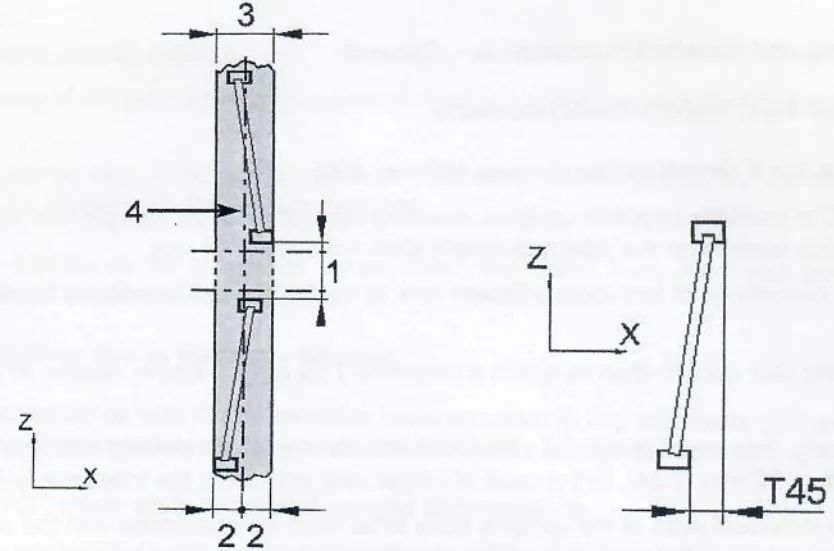
1 巷道
2 立柱半寬加15mm(1/2 T30)
3 立柱寬度加容差范圍30mm(T30)
4 立柱網格軸線
(b)
1 堆垛機豎向軸
2 局部圖
3 巷道
(c)
圖2 橫梁式貨架公差示意圖
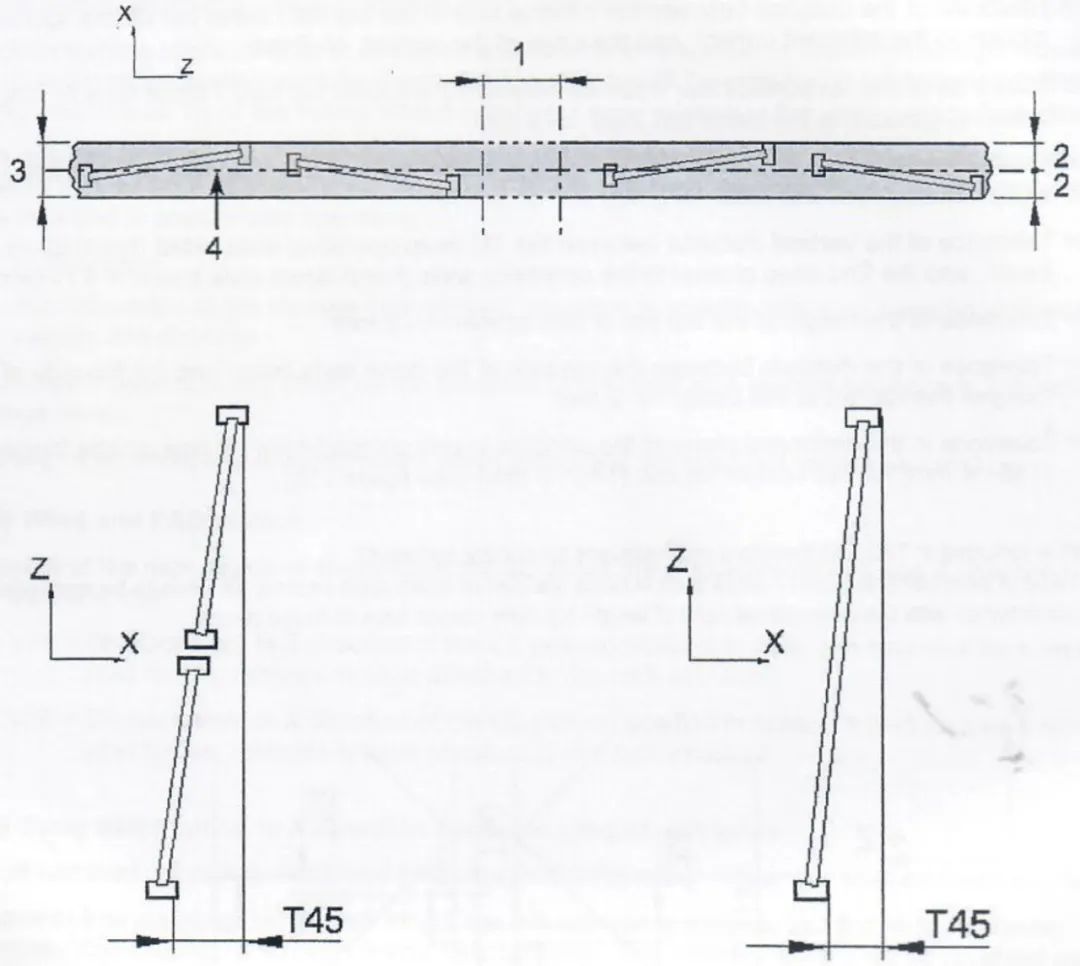
3.1 X向公差
相對的立柱因柱腳錯位、立柱傾斜與初始彎曲導致的在立柱全高范圍內的公差(T30):±15mm
相鄰立柱中心線距離公差(T53):±3mm
首根立柱中心線距離水平橫向基準線距離公差(T52):±10mm
貨架整體長度(L)偏離名義長度公差(T54):40m以下,±20mm;40m以上,±0.5‰L
對于D類控制系統,立柱組兩立柱位置偏離公差(T45):4mm
3.2 Z向公差
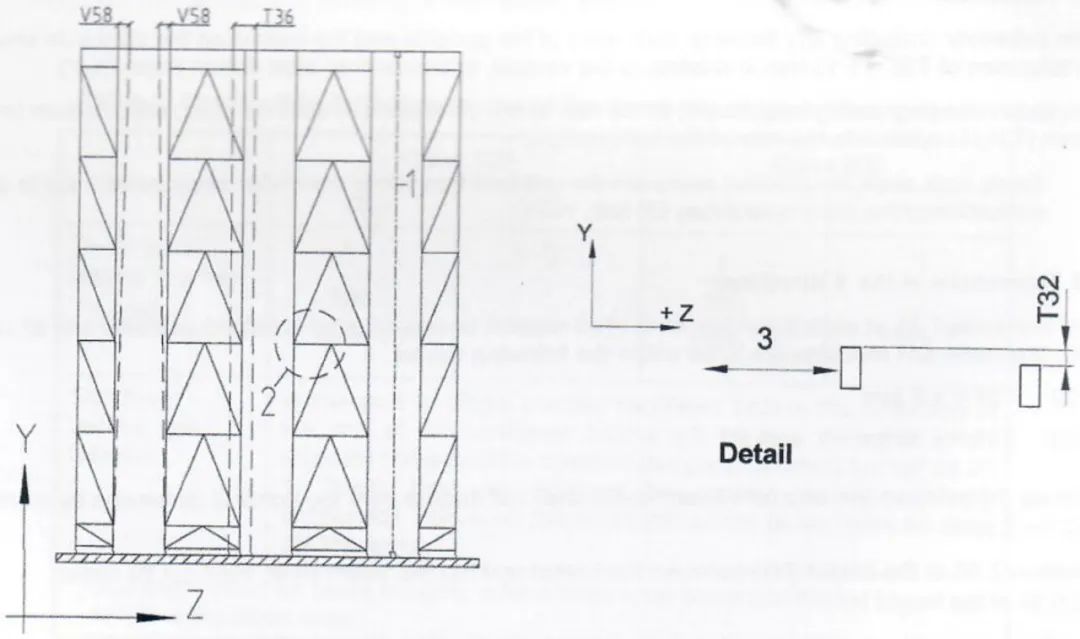
巷道兩側立柱或橫梁最外緣(含配件,如螺栓等)相對于豎直基準面(XY平面)公差(T36):±15mm
3.3 Y向公差
巷道兩側所有橫梁每層層高偏離名義尺寸公差(T31):
Class 100,±5mm;Class 200,±10mm
相鄰層間距(h)偏離名義尺寸公差(T33):±5mm
首層與頂層間距(H1)偏離名義尺寸公差(T51):±0.5‰H1
首層橫梁相對于固定基準面的水平公差(T50):±5mm
背部橫梁相對于前部橫梁(巷道內)水平公差(T32):+2mm/-4mm(+表示背部高)
需要注意的是,貨架立柱X向安裝傾斜公差V20與Y向安裝傾斜公差V58是由堆垛機供應商與貨架供應商溝通確定。由于V20屬于T30的一部分(V58也屬于T36的一部分),因此V20必須小于T30。
3.4 雙深位貨架公差
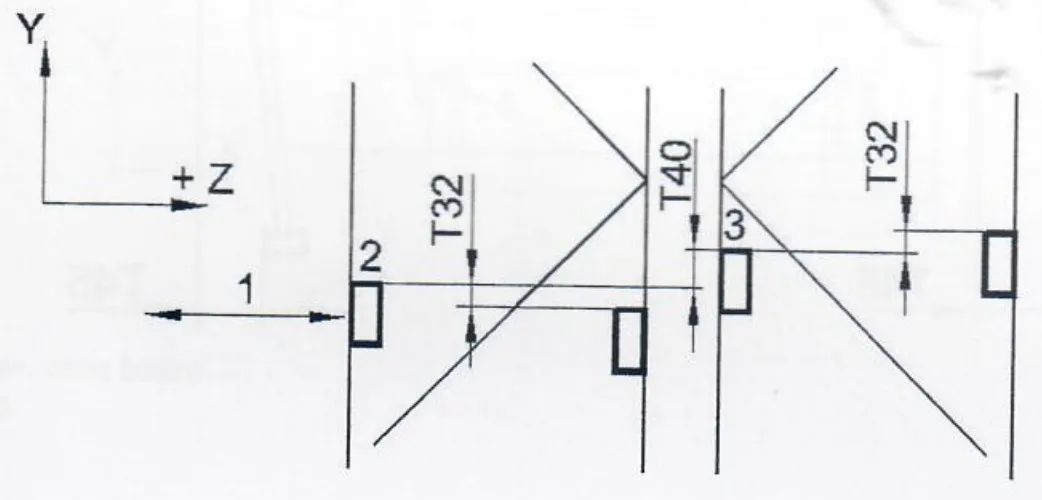
1 巷道
2 第一深位橫梁(靠近巷道側)
3 第二深位橫梁
(a)
(b)
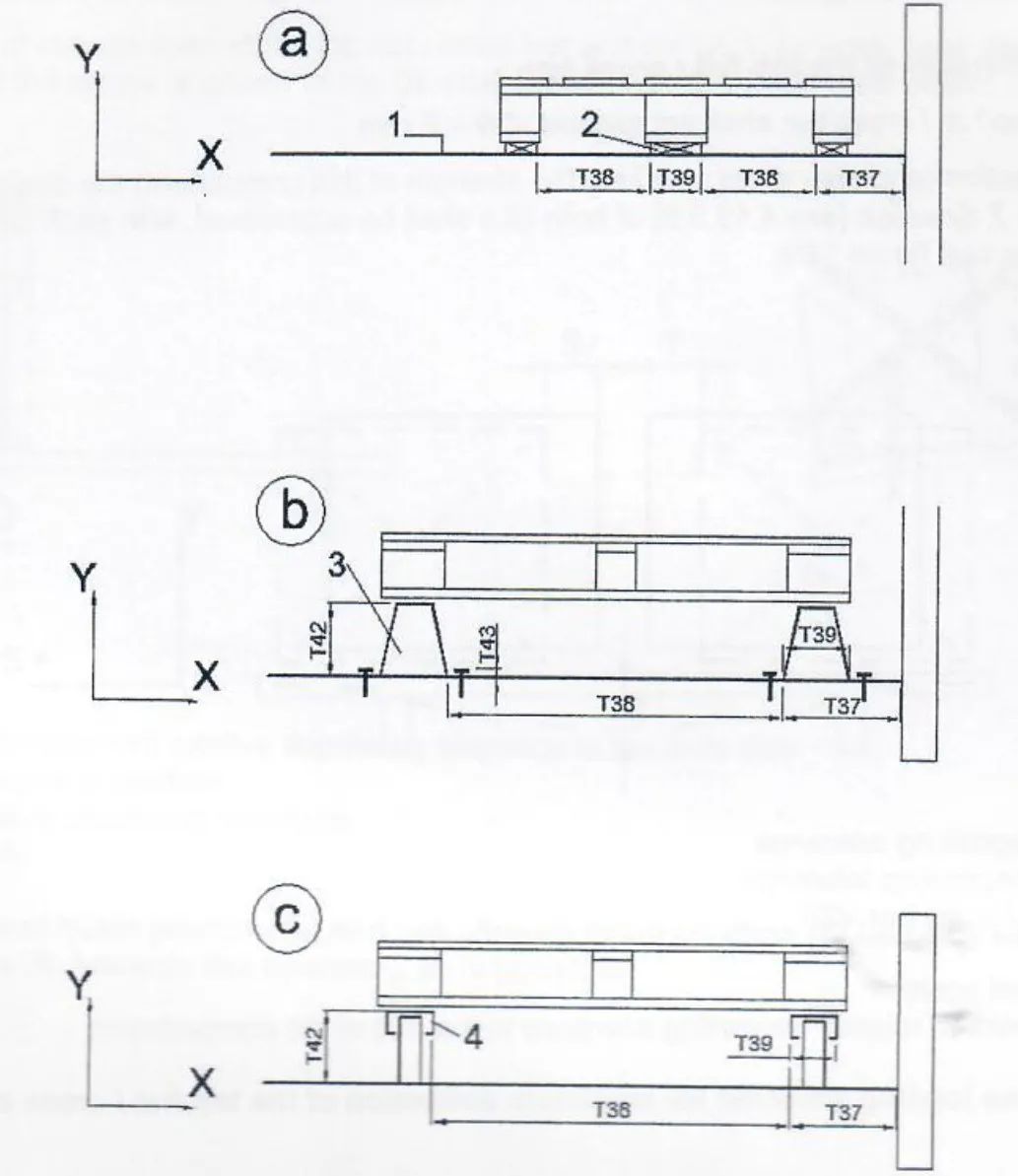
1 橫梁上表面
2 叉齒墊塊
3 帽形跨梁
4 跨梁
(c)
圖3 雙深位橫梁式貨架公差示意圖
對于上圖所示的雙深位橫梁式貨架,除了滿足以上公差,還應額外考慮:
叉齒墊塊/跨梁內側距相鄰立柱側邊的距離公差(T37):±2mm。
支承同一存儲單元的相鄰叉齒墊塊/跨梁的距離公差(T38):±2mm。
叉齒墊塊/跨梁最大寬度公差(T39):±2mm。
第一深位靠近巷道的橫梁與第二深位靠近巷道的橫梁豎向公差(T40):+4/-6mm。
叉齒墊塊/跨梁上表面距橫梁上表面的距離公差(T42):±2mm。
帽型跨梁固定螺栓上表面距橫梁上表面的距離公差(T43):±2mm。
同一貨格立柱組位置偏離公差(T45):單立柱組,4mm;雙立柱組,8mm。
本站的原創文章,請轉載時務必注明出處:穩圖WESAFE,不尊重原創的行為我們將追究責任。